4.2.3. SpaceX Falcon9 Launch Trajectory (Booster Recovery)#
2023 Devakumar Thammisetty
MPOPT is an open-source Multi-phase Optimal Control Problem (OCP) solver based on pseudo-spectral collocation with customized adaptive grid refinement techniques.
Download this notebook: falcon9_to_orbit.ipynb
Install mpopt from pypi using the following. Disable after first usage
Import mpopt (Contains main solver modules)
[1]:
#!pip install mpopt
from mpopt import mp
import numpy as np
import casadi as ca
4.2.3.1. Defining OCP#
OCP: (Multi stage launch vehicle OCP : Delta-III rocket) http://dx.doi.org/10.13140/RG.2.2.19519.79528
We first create an OCP object and then polulate the object with dynamics, path_constraints, terminal_constraints and objective (running_costs, terminal_costs)
[2]:
ocp = mp.OCP(n_states=7, n_controls=4, n_phases=3)
[3]:
# Initialize parameters
Re = 6378145.0 # m
omegaE = 7.29211585e-5
rho0 = 1.225
rhoH = 7200.0
Sa = 4 * np.pi
Cd = 0.5
muE = 3.986012e14
g0 = 9.80665
# Variable initialization
lat0 = 28.5 * np.pi / 180.0
r0 = np.array([Re * np.cos(lat0), 0.0, Re * np.sin(lat0)])
# v0 = omegaE*np.array([-r0[1], r0[0], 0.0])
v0 = omegaE * np.array([0.1, 0.1, 0.1])
m0 = 431.6e3 + 107.5e3
mf = 107.5e3 - 103.5e3
mdryBooster = 431.6e3 - 409.5e3
mdrySecond = mf
x0 = np.array([r0[0], r0[1], r0[2], v0[0], v0[1], v0[2], m0])
q_max = 80 * 1e3
[4]:
# Step-1 : Define dynamics
# Thrust(N) and mass flow rate(kg/s) in each stage
Thrust = [9 * 934.0e3, 934.0e3, 934.0e3]
def stage_dynamics(x, u, t, param=0, T=0.0):
r = x[:3]
v = x[3:6]
m = x[6]
r_mag = ca.sqrt(r[0] * r[0] + r[1] * r[1] + r[2] * r[2])
v_rel = v # ca.vertcat(v[0] + r[1] * omegaE, v[1] - r[0] * omegaE, v[2])
v_rel_mag = ca.sqrt(v_rel[0] * v_rel[0] + v_rel[1] * v_rel[1] + v_rel[2] * v_rel[2])
h = r_mag - Re
rho = rho0 * ca.exp(-h / rhoH)
D = -rho / (2 * m) * Sa * Cd * v_rel_mag * v_rel
g = -muE / (r_mag * r_mag * r_mag) * r
xdot = [
x[3],
x[4],
x[5],
T * u[3] / m * u[0] + param * D[0] + g[0],
T * u[3] / m * u[1] + param * D[1] + g[1],
T * u[3] / m * u[2] + param * D[2] + g[2],
-T * u[3] / (340.0 * g0),
]
return xdot
def get_dynamics(param):
dynamics0 = lambda x, u, t: stage_dynamics(x, u, t, param=param, T=Thrust[0])
dynamics1 = lambda x, u, t: stage_dynamics(x, u, t, param=param, T=Thrust[1])
dynamics2 = lambda x, u, t: stage_dynamics(x, u, t, param=param, T=Thrust[2])
return [dynamics0, dynamics1, dynamics2]
ocp.dynamics = get_dynamics(0)
[5]:
# Step-2: Add path constraints
def path_constraints0(x, u, t):
return [
u[0] * u[0] + u[1] * u[1] + u[2] * u[2] - 1,
-u[0] * u[0] - u[1] * u[1] - u[2] * u[2] + 1,
-ca.sqrt(x[0] * x[0] + x[1] * x[1] + x[2] * x[2]) / Re + 1,
]
def path_constraints2(x, u, t, dynP=0, gs=0):
r_mag = ca.sqrt(x[0] * x[0] + x[1] * x[1] + x[2] * x[2])
h = r_mag - Re
rho = rho0 * ca.exp(-h / rhoH)
v_sq = x[3] * x[3] + x[4] * x[4] + x[5] * x[5]
r_rf = ca.vertcat(x[0] - x0[0], x[1] - x0[1], x[2] - x0[2])
r_rf_mag = ca.sqrt(r_rf[0] * r_rf[0] + r_rf[1] * r_rf[1] + r_rf[2] * r_rf[2])
rf_mag = np.sqrt(x0[0] * x0[0] + x0[1] * x0[1] + x0[2] * x0[2])
glide_slope_factor = np.cos(80.0 * np.pi / 180.0)
return [
dynP * 0.5 * rho * v_sq / q_max - 1.0,
u[0] * u[0] + u[1] * u[1] + u[2] * u[2] - 1,
-u[0] * u[0] - u[1] * u[1] - u[2] * u[2] + 1,
-ca.sqrt(x[0] * x[0] + x[1] * x[1] + x[2] * x[2]) / Re + 1,
gs
* (
r_rf_mag * glide_slope_factor
- (r_rf[0] * x0[0] + r_rf[1] * x0[1] + r_rf[2] * x0[2]) / rf_mag
),
]
ocp.path_constraints = [path_constraints0, path_constraints0, path_constraints2]
[6]:
# Step-3: Add terminal cost and constraints
def terminal_cost1(xf, tf, x0, t0):
return -xf[6] / m0
ocp.terminal_costs[1] = terminal_cost1
def terminal_constraints1(x, t, x0, t0):
h = ca.vertcat(
x[1] * x[5] - x[4] * x[2], x[3] * x[2] - x[0] * x[5], x[0] * x[4] - x[1] * x[3]
)
n = ca.vertcat(-h[1], h[0], 0)
r = ca.sqrt(x[0] * x[0] + x[1] * x[1] + x[2] * x[2])
e = ca.vertcat(
1 / muE * (x[4] * h[2] - x[5] * h[1]) - x[0] / r,
1 / muE * (x[5] * h[0] - x[3] * h[2]) - x[1] / r,
1 / muE * (x[3] * h[1] - x[4] * h[0]) - x[2] / r,
)
e_mag = ca.sqrt(e[0] * e[0] + e[1] * e[1] + e[2] * e[2])
h_sq = h[0] * h[0] + h[1] * h[1] + h[2] * h[2]
v_mag = ca.sqrt(x[3] * x[3] + x[4] * x[4] + x[5] * x[5])
a = -muE / (v_mag * v_mag - 2.0 * muE / r)
i = ca.acos(h[2] / ca.sqrt(h_sq))
n_mag = ca.sqrt(n[0] * n[0] + n[1] * n[1])
node_asc = ca.acos(n[0] / n_mag)
# if n[1] < -1e-12:
node_asc = 2 * np.pi - node_asc
argP = ca.acos((n[0] * e[0] + n[1] * e[1]) / (n_mag * e_mag))
# if e[2] < 0:
# argP = 2*np.pi - argP
a_req = 6593145.0 # 24361140.0
e_req = 0.0076
i_req = 28.5 * np.pi / 180.0
node_asc_req = 269.8 * np.pi / 180.0
argP_req = 130.5 * np.pi / 180.0
return [
(a - a_req) / (Re),
e_mag - e_req,
i - i_req,
node_asc - node_asc_req,
argP - argP_req,
]
def terminal_constraints2(x, t, x_0, t_0):
return [
(x[0] - x0[0]) / Re,
(x[1] - x0[1]) / Re,
(x[2] - x0[2]) / Re,
(x[3] - x0[3]) / np.sqrt(muE / Re),
(x[4] - x0[4]) / np.sqrt(muE / Re),
(x[5] - x0[5]) / np.sqrt(muE / Re),
]
ocp.terminal_constraints[1] = terminal_constraints1
ocp.terminal_constraints[2] = terminal_constraints2
Scale the variables
[7]:
ocp.scale_x = np.array(
[
1 / Re,
1 / Re,
1 / Re,
1 / np.sqrt(muE / Re),
1 / np.sqrt(muE / Re),
1 / np.sqrt(muE / Re),
1 / m0,
]
)
ocp.scale_t = np.sqrt(muE / Re) / Re
Initial state and Final guess
[8]:
# Initial guess estimation
# User defined functions
def ae_to_rv(a, e, i, node, argP, th):
p = a * (1.0 - e * e)
r = p / (1.0 + e * np.cos(th))
r_vec = np.array([r * np.cos(th), r * np.sin(th), 0.0])
v_vec = np.sqrt(muE / p) * np.array([-np.sin(th), e + np.cos(th), 0.0])
cn, sn = np.cos(node), np.sin(node)
cp, sp = np.cos(argP), np.sin(argP)
ci, si = np.cos(i), np.sin(i)
R = np.array(
[
[cn * cp - sn * sp * ci, -cn * sp - sn * cp * ci, sn * si],
[sn * cp + cn * sp * ci, -sn * sp + cn * cp * ci, -cn * si],
[sp * si, cp * si, ci],
]
)
r_i = np.dot(R, r_vec)
v_i = np.dot(R, v_vec)
return r_i, v_i
# Target conditions
a_req = 6593145.0 # 24361140.0
e_req = 0.0076
i_req = 28.5 * np.pi / 180.0
node_asc_req = 269.8 * np.pi / 180.0
argP_req = 130.5 * np.pi / 180.0
th = 0.0
rf, vf = ae_to_rv(a_req, e_req, i_req, node_asc_req, argP_req, th)
xf = np.array([rf[0], rf[1], rf[2], vf[0], vf[1], vf[2], mf])
Intial guess
[9]:
# Timings
# Timings
t0, t1, t2, t3 = 0.0, 131.4, 453.4, 569.7
# Interpolate to get starting values for intermediate phases
x1 = x0 + (xf - x0) / (t2 - t0) * (t1 - t0)
# Update the state discontinuity values across phases
x0f = np.copy(x1)
x0f[-1] = x0[-1] - (9 * 934e3 / (340.0 * g0) * t1)
mFirst_leftout = 409.5e3 - (9 * 934e3 / (340.0 * g0) * t1)
x1[-1] = x0f[-1] - (mdryBooster + mFirst_leftout)
# Step-8b: Initial guess for the states, controls and phase start and final
# times
ocp.x00 = np.array([x0, x1, x0f])
ocp.xf0 = np.array([x0f, xf, x0])
ocp.u00 = np.array([[1, 0, 0, 1.0], [1, 0, 0, 1], [0, 1, 0, 1]])
ocp.uf0 = np.array([[0, 1, 0, 1.0], [0, 1, 0, 1], [1, 0, 0, 0.5]])
ocp.t00 = np.array([[t0], [t1], [t1]])
ocp.tf0 = np.array([[t1], [t2], [t3]])
Box constraints
[10]:
# Step-8c: Bounds for states
rmin, rmax = -2 * Re, 2 * Re
vmin, vmax = -10000.0, 10000.0
lbx0 = [rmin, rmin, rmin, vmin, vmin, vmin, x0f[-1]]
lbx1 = [rmin, rmin, rmin, vmin, vmin, vmin, xf[-1]]
lbx2 = [rmin, rmin, rmin, vmin, vmin, vmin, mdryBooster]
ubx0 = [rmax, rmax, rmax, vmax, vmax, vmax, x0[-1]]
ubx1 = [rmax, rmax, rmax, vmax, vmax, vmax, 107.5e3]
ubx2 = [rmax, rmax, rmax, vmax, vmax, vmax, x0f[-1] - 107.5e3]
ocp.lbx = np.array([lbx0, lbx1, lbx2])
ocp.ubx = np.array([ubx0, ubx1, ubx2])
# Bounds for control inputs
ocp.lbu = np.array(
[[-1.0, -1.0, -1.0, 1.0], [-1.0, -1.0, -1.0, 1.0], [-1.0, -1.0, -1.0, 0.38]]
)
ocp.ubu = np.array([[1.0, 1.0, 1.0, 1.0], [1.0, 1.0, 1.0, 1.0], [1.0, 1.0, 1.0, 1.0]])
# Bounds for phase start and final times
ocp.lbt0 = np.array([[t0], [t1], [t1]])
ocp.ubt0 = np.array([[t0], [t1], [t1]])
ocp.lbtf = np.array([[t1], [t2 - 50], [t3 - 100]])
ocp.ubtf = np.array([[t1], [t2 + 50], [t3 + 100]])
# Event constraint bounds on states : State continuity/disc.
lbe0 = [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, -(mdryBooster + mFirst_leftout)]
lbe1 = [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, -107.5e3]
ocp.lbe = np.array([lbe0, lbe1])
ocp.ube = np.array([lbe0, lbe1])
ocp.phase_links = [(0, 1), (0, 2)]
[11]:
ocp.validate()
4.2.3.2. Solve with atmospheric drag disabled#
[12]:
ocp.dynamics = get_dynamics(0)
mpo = mp.mpopt(ocp, 5, 6)
sol = mpo.solve()
******************************************************************************
This program contains Ipopt, a library for large-scale nonlinear optimization.
Ipopt is released as open source code under the Eclipse Public License (EPL).
For more information visit http://projects.coin-or.org/Ipopt
******************************************************************************
Total number of variables............................: 956
variables with only lower bounds: 0
variables with lower and upper bounds: 956
variables with only upper bounds: 0
Total number of equality constraints.................: 746
Total number of inequality constraints...............: 641
inequality constraints with only lower bounds: 0
inequality constraints with lower and upper bounds: 300
inequality constraints with only upper bounds: 341
Number of Iterations....: 153
(scaled) (unscaled)
Objective...............: -2.9204480860707361e-02 -2.9204480860707361e-02
Dual infeasibility......: 1.9040474700928261e-07 1.9040474700928261e-07
Constraint violation....: 6.7175836255209499e-06 6.7175836255209499e-06
Complementarity.........: 2.5059035596800655e-09 2.5059035596800655e-09
Overall NLP error.......: 6.7175836255209499e-06 6.7175836255209499e-06
Number of objective function evaluations = 203
Number of objective gradient evaluations = 154
Number of equality constraint evaluations = 203
Number of inequality constraint evaluations = 203
Number of equality constraint Jacobian evaluations = 154
Number of inequality constraint Jacobian evaluations = 154
Number of Lagrangian Hessian evaluations = 153
Total CPU secs in IPOPT (w/o function evaluations) = 2.930
Total CPU secs in NLP function evaluations = 0.117
EXIT: Solved To Acceptable Level.
solver : t_proc (avg) t_wall (avg) n_eval
nlp_f | 744.00us ( 3.67us) 720.91us ( 3.55us) 203
nlp_g | 28.51ms (140.46us) 28.24ms (139.09us) 203
nlp_grad | 384.00us (384.00us) 383.90us (383.90us) 1
nlp_grad_f | 1.51ms ( 9.72us) 1.41ms ( 9.13us) 155
nlp_hess_l | 34.36ms (224.61us) 34.18ms (223.38us) 153
nlp_jac_g | 41.84ms (269.92us) 41.74ms (269.30us) 155
total | 3.07 s ( 3.07 s) 3.06 s ( 3.06 s) 1
Solve the problem with drag enabled now with revised initial guess
[13]:
ocp.dynamics = get_dynamics(1)
ocp.path_constraints[2] = lambda x, u, t: path_constraints2(x, u, t, dynP=1, gs=0)
ocp.validate()
mpo._ocp = ocp
sol = mpo.solve(
sol, reinitialize_nlp=True, nlp_solver_options={"ipopt.acceptable_tol": 1e-6}
)
Total number of variables............................: 956
variables with only lower bounds: 0
variables with lower and upper bounds: 956
variables with only upper bounds: 0
Total number of equality constraints.................: 746
Total number of inequality constraints...............: 641
inequality constraints with only lower bounds: 0
inequality constraints with lower and upper bounds: 300
inequality constraints with only upper bounds: 341
Number of Iterations....: 61
(scaled) (unscaled)
Objective...............: -3.1423421485119993e-02 -3.1423421485119993e-02
Dual infeasibility......: 6.7634340985309009e-12 6.7634340985309009e-12
Constraint violation....: 1.9999893324795792e-08 1.9999893324795792e-08
Complementarity.........: 9.1006695117999755e-10 9.1006695117999755e-10
Overall NLP error.......: 1.9999893324795792e-08 1.9999893324795792e-08
Number of objective function evaluations = 172
Number of objective gradient evaluations = 63
Number of equality constraint evaluations = 172
Number of inequality constraint evaluations = 172
Number of equality constraint Jacobian evaluations = 63
Number of inequality constraint Jacobian evaluations = 63
Number of Lagrangian Hessian evaluations = 62
Total CPU secs in IPOPT (w/o function evaluations) = 1.441
Total CPU secs in NLP function evaluations = 0.079
EXIT: Solved To Acceptable Level.
solver : t_proc (avg) t_wall (avg) n_eval
nlp_f | 539.00us ( 3.13us) 523.99us ( 3.05us) 172
nlp_g | 25.06ms (145.73us) 24.79ms (144.13us) 172
nlp_grad | 305.00us (305.00us) 303.70us (303.70us) 1
nlp_grad_f | 579.00us ( 9.05us) 660.80us ( 10.33us) 64
nlp_hess_l | 25.98ms (419.10us) 25.94ms (418.32us) 62
nlp_jac_g | 23.84ms (372.56us) 23.79ms (371.73us) 64
total | 1.55 s ( 1.55 s) 1.54 s ( 1.54 s) 1
Retrive data from the solution
[14]:
post = mpo.process_results(sol, plot=False, scaling=False)
mp.post_process._INTERPOLATION_NODES_PER_SEG = 200
x, u, t, _ = post.get_data(phases=ocp.phase_links[0], interpolate=False)
print("Payload:\nMass to orbit : ", round(x[-1][-1], 4), "kg(MPOPT) vs 17310kg(Beigler paper)")
print("Time to orbit (SECO) : ", round(t[-1][0], 4), "s(MPOPT) vs 453.4s(Beigler paper)")
x, u, t, _ = post.get_data(phases=ocp.phase_links[1], interpolate=False)
print("\nBooster:\n Mass at landing : ", round(x[-1][-1], 4), "kg(MPOPT) vs 22100kg(Beigler paper)")
print("Time of landing : ", round(t[-1][0], 4), "s(MPOPT) vs 569.7s(Beigler paper)")
Payload:
Mass to orbit : 16940.3665 kg(MPOPT) vs 17310kg(Beigler paper)
Time to orbit (SECO) : 454.6864 s(MPOPT) vs 453.4s(Beigler paper)
Booster:
Mass at landing : 22100.0 kg(MPOPT) vs 22100kg(Beigler paper)
Time of landing : 579.5091 s(MPOPT) vs 569.7s(Beigler paper)
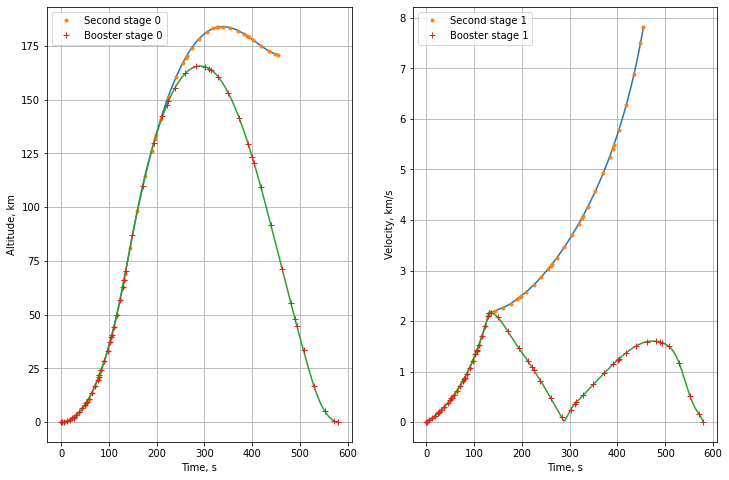
4.2.3.3. Plot results#
Plot trajectory of launch to orbit (Second stage) and Booster return to Ship.
[15]:
mp.plt.rcParams["figure.figsize"] = (12,8)
x0, u0, t0, _ = post.get_data(phases=ocp.phase_links[0], interpolate=True)
x1, u1, t1, _ = post.get_data(phases=ocp.phase_links[1], interpolate=True)
x0o, u0o, t0o, _ = post.get_data(phases=ocp.phase_links[0], interpolate=False)
x1o, u1o, t1o, _ = post.get_data(phases=ocp.phase_links[1], interpolate=False)
r0 = 1e-3 * (np.sqrt(x0[:, 0] ** 2 + x0[:, 1] ** 2 + x0[:, 2] ** 2) - Re)
v0 = 1e-3 * np.sqrt(x0[:, 3] ** 2 + x0[:, 4] ** 2 + x0[:, 5] ** 2)
y0 = np.column_stack((r0, v0))
fig0, axs0 = post.plot_single_variable(y0, t0, [[0], [1]], axis=0)
r0o = 1e-3 * (np.sqrt(x0o[:, 0] ** 2 + x0o[:, 1] ** 2 + x0o[:, 2] ** 2) - Re)
v0o = 1e-3 * np.sqrt(x0o[:, 3] ** 2 + x0o[:, 4] ** 2 + x0o[:, 5] ** 2)
y0o = np.column_stack((r0o, v0o))
fig0o, axs0o = post.plot_single_variable(
y0o,
t0o,
[[0], [1]],
axis=0,
fig=fig0,
axs=axs0,
tics=["."] * 15,
name="Second stage",
)
r1 = 1e-3 * (np.sqrt(x1[:, 0] ** 2 + x1[:, 1] ** 2 + x1[:, 2] ** 2) - Re)
v1 = 1e-3 * np.sqrt(x1[:, 3] ** 2 + x1[:, 4] ** 2 + x1[:, 5] ** 2)
y1 = np.column_stack((r1, v1))
fig1, axs1 = post.plot_single_variable(y1, t1, [[0], [1]], axis=0, fig=fig0o, axs=axs0o)
r1o = 1e-3 * (np.sqrt(x1o[:, 0] ** 2 + x1o[:, 1] ** 2 + x1o[:, 2] ** 2) - Re)
v1o = 1e-3 * np.sqrt(x1o[:, 3] ** 2 + x1o[:, 4] ** 2 + x1o[:, 5] ** 2)
y1o = np.column_stack((r1o, v1o))
fig1o, axs1o = post.plot_single_variable(
y1o,
t1o,
[[0], [1]],
axis=0,
fig=fig1,
axs=axs1,
tics=["+"] * 15,
name="Booster stage",
)
axs1o[0].set(ylabel="Altitude, km")
axs1o[1].set(ylabel="Velocity, km/s")
[15]:
[Text(0, 0.5, 'Velocity, km/s')]